BallIP robot es capaz de mantener el equilibrio sobre una pelota, mientras que tiene un peso
 El Dr. Masaaki Kumagai, director de Desarrollo del robot en el Laboratorio de Ingeniería de la Universidad Tohoku Gakuin , en Tagajo City, Japón, y su estudiante Takaya Ochiai han construido un robot llamado BallIP (Bola Péndulo Invertido) que es capaz de mantener el equilibrio sobre una pelota. Este diseño de la bola de equilibrio es como un péndulo invertido, y por lo tanto naturalmente inestable, pero que ofrece ventajas, ya que tiene un tamaño reducido y puede moverse en cualquier dirección sin cambiar su orientación.
El Dr. Masaaki Kumagai, director de Desarrollo del robot en el Laboratorio de Ingeniería de la Universidad Tohoku Gakuin , en Tagajo City, Japón, y su estudiante Takaya Ochiai han construido un robot llamado BallIP (Bola Péndulo Invertido) que es capaz de mantener el equilibrio sobre una pelota. Este diseño de la bola de equilibrio es como un péndulo invertido, y por lo tanto naturalmente inestable, pero que ofrece ventajas, ya que tiene un tamaño reducido y puede moverse en cualquier dirección sin cambiar su orientación.
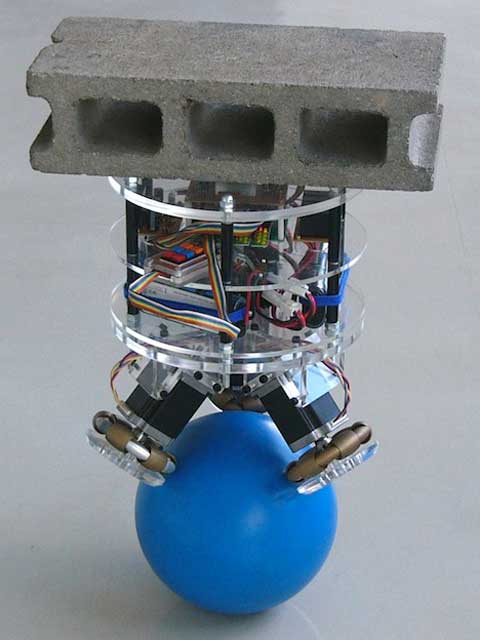
El robot es aproximadamente la mitad de metros de altura (1,64 metros) y pesa 7,5 kg (16,5 punds). El balón en el que equilibra es una bola de bolera 3,6-kg (8 libras) con un diámetro centímetro 20 (casi 8 pulgadas) y recubierto con goma de pulverización. La bola recubierta de caucho es impulsado por tres ruedas omnidireccionales desarrollados en I + D de Japón Instituto RIKEN. Las ruedas permiten que el robot no sólo para estar quieto, pero también se mueven en cualquier dirección y girar alrededor de su eje vertical.
Para accionar las ruedas, optaron por motores NIDEC y micro-controladores de paso para alcanzar una tasa de 0,225 grados por paso, lo que hizo la rotación de las ruedas lisas.Sistema de control del robot funciona con un microcontrolador de 16 bits, que recibe los datos de dos grupos de giroscopios y acelerómetros Analog Devices. Los giroscopios se utilizan para detectar movimientos rápidos, o componentes de alta frecuencia, así como para ayudar a los acelerómetros detectar la inclinación que se ve afectado por el movimiento del robot.
No hay comentarios:
Publicar un comentario