EMIEW 2, un robot que encuentra cosas perdidas
ver video
Es el sueño de todo despistado. Un robot de 80 centímetros de alto y 14 kilos de peso, que sabe dónde están las llaves, el celular, las gafas y todas esas cosas que a menudo se pierden de vista. Además, camina a la velocidad de una persona normal, evade obstáculos, tiene un simpático ‘look’ japonés y hasta sonríe y hace monerías. Se trata de EMIEW 2, un robot desarrollado por Hitachi.
Su hermano mayor, llamado EMIEW (a secas), fue desarrollado en 2005. Según el fabricante, esta nueva versión es “un robot de servicio con diversas funciones de comunicación, que podría coexistir pacíficamente con humanos mientras cumple funciones necesarias”. Para ello, cuenta con reconocimiento de voz aún en ambientes ruidosos, flexibilidad en brazos y piernas y un sistema de soporte que le permite evadir obstáculos y mantener la estabilidad en terrenos cambiantes.
Pero lo más destacado es su inteligencia artificial, que en conjunto con su excelente sentido de orientación son los que le permiten encontrar cosas perdidas. Cada vez que le muestran un objeto, EMIEW 2 detecta su forma y color y los compara con una base de datos alimentada con imágenes bajadas de Internet. Si encuentra una coincidencia, el robot aprende qué tipo de objeto es y lo puede buscar en el futuro.
¿Cómo lo busca? Cuando el usuario le pregunta al robot, él rastrea la red de cámaras de una habitación, lo ubica, va hacia él y se lo pone en las manos a la persona. Además tiene la capacidad de generar un mapa de la casa y reconocer y nombrar los diferentes sitios de esta, lo que le permite informar el nombre de la ubicación (por ejemplo, ‘el cuarto de los niños’) del objeto que está buscando.
Hitachi todavía no tiene planes para comercializar el EMIEW 2. Sin embargo, según Portaltic, sus desarrolladores “creen que al final se convertirá en una presencia habitual en residencias de ancianos, hospitales y lugares turísticos y, en última instancia, de los hogares”.
viernes, 29 de junio de 2012
domingo, 17 de junio de 2012
BallIP robot es capaz de mantener el equilibrio sobre una pelota, mientras que tiene un peso
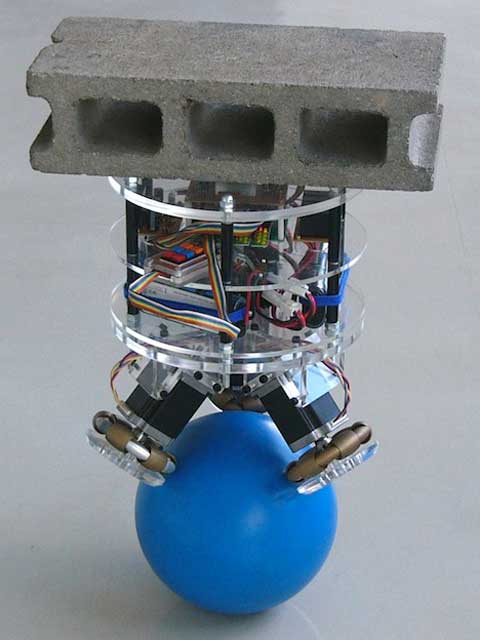 El Dr. Masaaki Kumagai, director de Desarrollo del robot en el Laboratorio de Ingeniería de la Universidad Tohoku Gakuin , en Tagajo City, Japón, y su estudiante Takaya Ochiai han construido un robot llamado BallIP (Bola Péndulo Invertido) que es capaz de mantener el equilibrio sobre una pelota. Este diseño de la bola de equilibrio es como un péndulo invertido, y por lo tanto naturalmente inestable, pero que ofrece ventajas, ya que tiene un tamaño reducido y puede moverse en cualquier dirección sin cambiar su orientación.
El Dr. Masaaki Kumagai, director de Desarrollo del robot en el Laboratorio de Ingeniería de la Universidad Tohoku Gakuin , en Tagajo City, Japón, y su estudiante Takaya Ochiai han construido un robot llamado BallIP (Bola Péndulo Invertido) que es capaz de mantener el equilibrio sobre una pelota. Este diseño de la bola de equilibrio es como un péndulo invertido, y por lo tanto naturalmente inestable, pero que ofrece ventajas, ya que tiene un tamaño reducido y puede moverse en cualquier dirección sin cambiar su orientación.
El robot es aproximadamente la mitad de metros de altura (1,64 metros) y pesa 7,5 kg (16,5 punds). El balón en el que equilibra es una bola de bolera 3,6-kg (8 libras) con un diámetro centímetro 20 (casi 8 pulgadas) y recubierto con goma de pulverización. La bola recubierta de caucho es impulsado por tres ruedas omnidireccionales desarrollados en I + D de Japón Instituto RIKEN. Las ruedas permiten que el robot no sólo para estar quieto, pero también se mueven en cualquier dirección y girar alrededor de su eje vertical.
Para accionar las ruedas, optaron por motores NIDEC y micro-controladores de paso para alcanzar una tasa de 0,225 grados por paso, lo que hizo la rotación de las ruedas lisas.Sistema de control del robot funciona con un microcontrolador de 16 bits, que recibe los datos de dos grupos de giroscopios y acelerómetros Analog Devices. Los giroscopios se utilizan para detectar movimientos rápidos, o componentes de alta frecuencia, así como para ayudar a los acelerómetros detectar la inclinación que se ve afectado por el movimiento del robot.
El robot que piensa por sí mismo ya no es un asunto de ciencia ficción
Hiro es capaz de aprender, recordar y tomar decisiones en situaciones reales.
Hay un robot en casa, ve la cocina y piensa que lo mejor para preparar hoy sería pasta. Sí, piensa, porque la Inteligencia Artificial ha llevado a creer que es posible que los robots piensen, pero en un futuro. Como en una escena sacada de una película. Esta realidad ya está cerca: en el Instituto de Tecnología de Tokio, un grupo de investigadores liderado por el profesor Osamu Hasegawa desarrolló un robot capaz de pensar, actuar y aprender por sí mismo, al que ha bautizado Hiro.
¿Cómo saber si un robot es capaz de hacer todas estas cosas de manera autónoma? Realizando algunas pruebas que demuestren sus capacidades. Los experimentos realizados con Hiro involucraron resolver problemas específicos en los que el robot debía tomar decisiones adecuadas, como servir un vaso de agua y entregarlo a una persona específica. Después de realizados sus trabajos, Hiro recopila la información, teniendo en cuenta el entorno, y aprende sobre lo que ha hecho.
La tecnología que permite a Hiro hacer esto es conocida como una red neuronal incremental autoorganizable, oSOINN (Self-Organizing Incremental Neural Network), que imita la manera como piensan los seres humanos, especialmente cuando se trata de tareas nuevas que requieren un esfuerzo para un aprendizaje.
Hiro recopila la información de manera visual y auditiva, la transmite a SOINN, y allí se comparan estos datos con lo que puede encontrar en Internet y en las experiencias y conocimientos de otros robots. Al finalizar, almacena los resultados para poder realizar sus tareas de manera más completa y precisa la próxima vez.
En los últimos años, la evolución de la robótica ha llevado a que muchos robots sean capaces de hacer tareas específicas e incluso de aprender tareas nuevas, pero si se les cambia el entorno no pueden hacer nada. Lo nuevo de Hiro es que es el mayor avance hacia un robot autónomo, capaz de adaptarse a los cambios y tomar decisiones. “Hasta ahora los robots, incluyendo los industriales, han sido capaces de realizar tareas específicas con rapidez y precisión. Pero si el entorno cambia ligeramente, no pueden responder. Este robot recuerda no solo conocimientos básicos, sino que los recopila, y después se puede aplicar ese conocimiento a la situación inmediata”, declaró un vocero del grupo de investigación de Hasegawa.
Con este tipo de tecnología se puede brindar ayuda a personas con problemas de movilidad y que necesiten asistencia específica para realización de tareas, entre otras aplicaciones. Este robot es la demostración que los avances de la Inteligencia Artificial ya no son un asunto de la ciencia ficción, sino que el futuro parece estar cada vez más cerca.
by:RVB
Reem-B es un Robot Fabricado por la empresa de los Emiratos Árabes Pal Robotics y un equipo de ingenieros catalanes para ser Mayordomo.
Se habla de el desde Diciembre del año pasado, cuando lo presentaron en la III Jornada robótica que se hizo en Barcelona. Este robot es lo más parecido a la imagen que la mayoría de las personas tienen en su mente de un robot, cuadrado, de color plateado, con cabeza tronco y extremidades. Pero este robot es mucho más que esto.
Reem-b Reconoce caras Humanas, reconoce la voz de su interlocutor y responde a lo que le dice(obviamente a ciertas ordenes que tiene programadas), Tiene la capacidad de realizar múltiples movimientos como caminar, subir escalas, sentarse y coger objetos.
tiene la capacidad de:
tiene la capacidad de:
Orientarse en un lugar después de haberlo reconocido. creando mapas.
transportar objetos de hasta 12 Kilos
Reconoce y manipula objetos comunes(como servir un refresco)
transportar objetos de hasta 12 Kilos
Reconoce y manipula objetos comunes(como servir un refresco)
como pueden ver es un Excelente robot, que perfeccionándolo puede llegar a ser muy útil y comercial. les gustó lo que acaban de leer??
bien pues ahora veanlo en acción.
bien pues ahora veanlo en acción.
by:RVB
sábado, 16 de junio de 2012
Robots humanoides podrán caminar por la calle en 10 años, según experto danés
Este contenido ha sido publicado originalmente por Diario EL COMERCIO en la siguiente dirección: http://www.elcomercio.com/tecnologia/ciencia/Robots-humanoides-podran-caminar-experto_0_719328098.html. Si está pensando en hacer uso del mismo, por favor, cite la fuente y haga un enlace hacia la nota original de donde usted ha tomado este contenido. ElComercio.com
 Los robots humanoides podrán caminar por la calle en diez años y convivir con los seres humanos sin que éstos se percaten de su naturaleza electrónica, aseguró hoy en Lima el profesor de la Universidad de Aalborg (Dinamarca), Henrik Scharfe, quien ha creado un robot con su misma apariencia. Durante la inauguración de ExpoTic 2012, la primera feria y congreso internacional de infraestructura e innovación tecnológica que se realiza en Lima hasta el sábado, Scharfe presentó a Geminoid-DK, un robot creado a su imagen y semejanza, capaz de imitar sus movimientos faciales y mantener conversaciones con su ideólogo. En una conferencia, Scharfe indicó que su clon robótico, que de momento está sentado y conectado a una computadora, podrá caminar por la calle e interactuar con otra gente "en tan sólo una década, si en ese tiempo se construye infraestructura avanzada, convergen fuentes tecnológicas y sacamos los robots de los laboratorios". Hasta ahora su robot ha servido para experimentar la interacción de las personas con él, ha tomado exámenes orales a los alumnos de Scharfe e incluso ha asistido a una fiesta en su casa. "Para ver a un humanoide paseando entre nosotros sólo se necesita mejorar la tecnología existente, como la autonomía de las baterías, los sistemas para evitar obstáculos y los sistemas de navegación", añadió. Sin embargo, Scharfe señaló que "es imposible e irrelevante pensar en qué tecnología habrá en 10, 50 ó 100 años, porque de la misma manera no podemos saber qué historias se contarán en ese tiempo o qué música se compondrá". Por ello, defendió que la solución a los problemas de la humanidad en el futuro no será la tecnología, sino que la tecnología será el canal o la herramienta por la que las soluciones podrán aplicarse. El profesor danés explicó que este desarrollo dará lugar a que los androides o humanoides ocupen funciones de un asistente personal, "como por ejemplo la gestión del correo electrónico", pero también de servicio al público, "como un maniquí que explique al comprador las características de la ropa que está interesado en comprar". Scharfe señaló que esta situación será habitual porque "los humanos tratamos a un robot como si fuera otro ser humano si éste tiene la apariencia de una persona, a pesar de que ahora resulte sorprendente ver a un androide que atiende al público o que simplemente viaja en avión". "Es muy difícil que las personas desarrollemos reacciones emotivas ante un robot de una fábrica de coches, con un cuerpo metálico, cuadrado, robusto y de apariencia peligrosa, pero es mucho más fácil si el robot tiene un rostro humano y además nos ayuda en casa, aunque sepamos que su interior es electrónico", continuó. No obstante, el creador de Geminoid-DK ha constatado que las reacciones de una persona ante un androide con apariencia humana varían según "la edad, el género y la situación donde se da la interacción". "Así que habrá que ser cautos cuando estos androides convivan entre nosotros y, en el momento de fabricarlos, habrá que vigilar muy bien cuál es su función y el público objetivo al que se dirigen", agregó. La robótica en su versión más principiante también tiene espacio en esta feria con una competición de escolares, cuyas creaciones deben completar un circuito en el menor tiempo posible y sólo con la ayuda de sus detectores. Además, también se presentan las últimas innovaciones en videojuegos interactivos y una plataforma de seguridad ciudadana que recibe avisos de hechos delictivos con fotos o vídeos, a través de teléfonos, celulares, Twitter o terminales para el pago con tarjetas de crédito.
Los robots humanoides podrán caminar por la calle en diez años y convivir con los seres humanos sin que éstos se percaten de su naturaleza electrónica, aseguró hoy en Lima el profesor de la Universidad de Aalborg (Dinamarca), Henrik Scharfe, quien ha creado un robot con su misma apariencia. Durante la inauguración de ExpoTic 2012, la primera feria y congreso internacional de infraestructura e innovación tecnológica que se realiza en Lima hasta el sábado, Scharfe presentó a Geminoid-DK, un robot creado a su imagen y semejanza, capaz de imitar sus movimientos faciales y mantener conversaciones con su ideólogo. En una conferencia, Scharfe indicó que su clon robótico, que de momento está sentado y conectado a una computadora, podrá caminar por la calle e interactuar con otra gente "en tan sólo una década, si en ese tiempo se construye infraestructura avanzada, convergen fuentes tecnológicas y sacamos los robots de los laboratorios". Hasta ahora su robot ha servido para experimentar la interacción de las personas con él, ha tomado exámenes orales a los alumnos de Scharfe e incluso ha asistido a una fiesta en su casa. "Para ver a un humanoide paseando entre nosotros sólo se necesita mejorar la tecnología existente, como la autonomía de las baterías, los sistemas para evitar obstáculos y los sistemas de navegación", añadió. Sin embargo, Scharfe señaló que "es imposible e irrelevante pensar en qué tecnología habrá en 10, 50 ó 100 años, porque de la misma manera no podemos saber qué historias se contarán en ese tiempo o qué música se compondrá". Por ello, defendió que la solución a los problemas de la humanidad en el futuro no será la tecnología, sino que la tecnología será el canal o la herramienta por la que las soluciones podrán aplicarse. El profesor danés explicó que este desarrollo dará lugar a que los androides o humanoides ocupen funciones de un asistente personal, "como por ejemplo la gestión del correo electrónico", pero también de servicio al público, "como un maniquí que explique al comprador las características de la ropa que está interesado en comprar". Scharfe señaló que esta situación será habitual porque "los humanos tratamos a un robot como si fuera otro ser humano si éste tiene la apariencia de una persona, a pesar de que ahora resulte sorprendente ver a un androide que atiende al público o que simplemente viaja en avión". "Es muy difícil que las personas desarrollemos reacciones emotivas ante un robot de una fábrica de coches, con un cuerpo metálico, cuadrado, robusto y de apariencia peligrosa, pero es mucho más fácil si el robot tiene un rostro humano y además nos ayuda en casa, aunque sepamos que su interior es electrónico", continuó. No obstante, el creador de Geminoid-DK ha constatado que las reacciones de una persona ante un androide con apariencia humana varían según "la edad, el género y la situación donde se da la interacción". "Así que habrá que ser cautos cuando estos androides convivan entre nosotros y, en el momento de fabricarlos, habrá que vigilar muy bien cuál es su función y el público objetivo al que se dirigen", agregó. La robótica en su versión más principiante también tiene espacio en esta feria con una competición de escolares, cuyas creaciones deben completar un circuito en el menor tiempo posible y sólo con la ayuda de sus detectores. Además, también se presentan las últimas innovaciones en videojuegos interactivos y una plataforma de seguridad ciudadana que recibe avisos de hechos delictivos con fotos o vídeos, a través de teléfonos, celulares, Twitter o terminales para el pago con tarjetas de crédito.
Este contenido ha sido publicado originalmente por Diario EL COMERCIO en la siguiente dirección: http://www.elcomercio.com/tecnologia/ciencia/Robots-humanoides-podran-caminar-experto_0_719328098.html. Si está pensando en hacer uso del mismo, por favor, cite la fuente y haga un enlace hacia la nota original de donde usted ha tomado este contenido. ElComercio.com
Este contenido ha sido publicado originalmente por Diario EL COMERCIO en la siguiente dirección: http://www.elcomercio.com/tecnologia/ciencia/Robots-humanoides-podran-caminar-experto_0_719328098.html. Si está pensando en hacer uso del mismo, por favor, cite la fuente y haga un enlace hacia la nota original de donde usted ha tomado este contenido. ElComercio.com
Los robots humanoides podrán caminar por la calle en diez años y convivir con los seres humanos sin que éstos se percaten de su naturaleza electrónica, aseguró hoy en Lima el profesor de la Universidad de Aalborg (Dinamarca), Henrik Scharfe, quien ha creado un robot con su misma apariencia. Durante la inauguración de ExpoTic 2012, la primera feria y congreso internacional de infraestructura e innovación tecnológica que se realiza en Lima hasta el sábado, Scharfe presentó a Geminoid-DK, un robot creado a su imagen y semejanza, capaz de imitar sus movimientos faciales y mantener conversaciones con su ideólogo. En una conferencia, Scharfe indicó que su clon robótico, que de momento está sentado y conectado a una computadora, podrá caminar por la calle e interactuar con otra gente "en tan sólo una década, si en ese tiempo se construye infraestructura avanzada, convergen fuentes tecnológicas y sacamos los robots de los laboratorios". Hasta ahora su robot ha servido para experimentar la interacción de las personas con él, ha tomado exámenes orales a los alumnos de Scharfe e incluso ha asistido a una fiesta en su casa. "Para ver a un humanoide paseando entre nosotros sólo se necesita mejorar la tecnología existente, como la autonomía de las baterías, los sistemas para evitar obstáculos y los sistemas de navegación", añadió. Sin embargo, Scharfe señaló que "es imposible e irrelevante pensar en qué tecnología habrá en 10, 50 ó 100 años, porque de la misma manera no podemos saber qué historias se contarán en ese tiempo o qué música se compondrá". Por ello, defendió que la solución a los problemas de la humanidad en el futuro no será la tecnología, sino que la tecnología será el canal o la herramienta por la que las soluciones podrán aplicarse. El profesor danés explicó que este desarrollo dará lugar a que los androides o humanoides ocupen funciones de un asistente personal, "como por ejemplo la gestión del correo electrónico", pero también de servicio al público, "como un maniquí que explique al comprador las características de la ropa que está interesado en comprar". Scharfe señaló que esta situación será habitual porque "los humanos tratamos a un robot como si fuera otro ser humano si éste tiene la apariencia de una persona, a pesar de que ahora resulte sorprendente ver a un androide que atiende al público o que simplemente viaja en avión". "Es muy difícil que las personas desarrollemos reacciones emotivas ante un robot de una fábrica de coches, con un cuerpo metálico, cuadrado, robusto y de apariencia peligrosa, pero es mucho más fácil si el robot tiene un rostro humano y además nos ayuda en casa, aunque sepamos que su interior es electrónico", continuó. No obstante, el creador de Geminoid-DK ha constatado que las reacciones de una persona ante un androide con apariencia humana varían según "la edad, el género y la situación donde se da la interacción". "Así que habrá que ser cautos cuando estos androides convivan entre nosotros y, en el momento de fabricarlos, habrá que vigilar muy bien cuál es su función y el público objetivo al que se dirigen", agregó. La robótica en su versión más principiante también tiene espacio en esta feria con una competición de escolares, cuyas creaciones deben completar un circuito en el menor tiempo posible y sólo con la ayuda de sus detectores. Además, también se presentan las últimas innovaciones en videojuegos interactivos y una plataforma de seguridad ciudadana que recibe avisos de hechos delictivos con fotos o vídeos, a través de teléfonos, celulares, Twitter o terminales para el pago con tarjetas de crédito.
Este contenido ha sido publicado originalmente por Diario EL COMERCIO en la siguiente dirección: http://www.elcomercio.com/tecnologia/ciencia/Robots-humanoides-podran-caminar-experto_0_719328098.html. Si está pensando en hacer uso del mismo, por favor, cite la fuente y haga un enlace hacia la nota original de donde usted ha tomado este contenido. ElComercio.com
viernes, 15 de junio de 2012
sábado, 9 de junio de 2012
Robots inspirados en animales

Cuando pensamos en inteligencia artificial generalmente nos imaginamos a una supercomputadora pensante del tipo HAL 9000 de odisea en el espacio o robots pensantes de aspecto humanoide del tipo RD2D o, en su forma extrema, en los Replicantes de la película Blade Runner.
Si recuerdan, en esta misma película el policía Deckard debe en un momento saber diferenciar una serpiente biológica de la artificial “creada” por la compañía Tyrell. Aquí tenemos un prototipo actual de una serpiente “replicante”:
Si bien este prototipo de serpiente no está mal, los animales robots actuales han seguido un desarrollo igualmente impresionante que los de aspecto humanoide, y quizás en su funcionamiento interno se asemejen aún más a un organismo biológico que el mejor de los robots actuales con apariencia humana. Esto es porque los científicos, además de estar pensando en el diseño de robots para tareas específicas como, por ejemplo, un ensamblador de tuercas de coches, o que se parezcan en su forma a un ser humano, se han volcado en el desarrollo de robots más complejos, lo cuales puedan lidiar con circunstancias cambiantes e impredecibles. Para ello, están imitando cómo funcionan los organismos biológicos inspirándose principalmente en los animales. Estos animales robots de han denominado “ANIMATS”, palabra acuñada 1991 por S.W. Wilson que integra en un sola palabra el término ánima y el de “materia”, tanto para referirse a los animales artificiales o animales robots como a los programas simuladores de animales virtuales. Estos robots, que están inspirados en los mecanismos internos de funcionamiento de los animales, pueden o no tener formas que los asemejan a los animales reales y/o imitar su biología interna, pero claramente los más impresionantes son los que los imitan tanto en su funcionamiento interno como en su forma.
Así los investigadores están comenzado a imitar la mecánica de movimientos animales tales como caminar, nadar, correr y gatear. Estos movimientos, a diferencia de los robots comunes que están controlados por un set de comandos programados, están coordinados por clusters (conjuntos de elementos agrupados comportándose de forma similar) de neuronas en la columna vertebral, llamados generadores centrales de patrones (GCP). Estos GCPs producen impulsos neuronales que contraen rítmicamente los músculos y, dependiendo del patrón de pulsos que emitan, se producirá el tipo de movimiento específico, como por ejemplo, caminar o correr. Para esto no es necesario el cerebro en los animales (de hecho, esta es la razón por la que una gallina recién decapitada puede igualmente salir corriendo). En los animales, eso sí, simples signos provenientes del cerebro pueden dar las instrucciones para cambiar de un modo de movimiento a otro.
Así, por ejemplo, han logrado crear una salamandra que imitando a su par biológico se mueve igualmente del agua a la tierra gracias a que posee una columna vertebral “eléctrica”. Esta salamandra-robot actúa de la misma forma que la biológica, aunque la salamandra artificial no tiene sensores que le indiquen si está en el agua o en la tierra (es decir, un cerebro), por lo que estos fueron reemplazados por un control remoto manipulado por los investigadores. Del mismo modo han imitado a los llamados (al menos en Chile) “zancudos de agua”, creo que en España insectos “saltones” o “zapateros”, construyendo su animat con trozos finos de metal que se doblan cuando la electricidad pasa por ellos. Así utilizan, de la misma forma que el insecto, la tensión de la superficie del agua para desplazarse. Incluso se han creado robots que por medio del olor controlan a las cucarachas para indicarles dónde deben dirigirse.
Aquí veran algunos videos ilustrativos:
En este vemos con más detalle el pez robot, que aparecía al comienzo del anterior:
robot que imita el Waalbot y no necesita de nada parecido a una cabeza y un cerebro es el M-TRAN, aue utiliza algoritmos genéticos artificiales para realizar gran diversidad de movimientos y adaptarse así a situaciones nuevas. Además está construido con 20 módulos independientes que de alguna manera, al igual que un gusano segmentado, tiene cada uno su propio cerebro y, por tanto, podría perder cualquiera de sus partes sin afectar a las demás.
Y Acá tenéis un prototipo que imita el mecanismo de salto de los saltamontes y, dados su logros (hasta el momento es el robot que ha logrado saltar con mayor éxito), se espera que robots saltamontes de este tipo se utilicen en la exploración de otros planetas debido a su mayor adaptabilidad a distintas superficies en relación a otros robots de propósito similar.
Un robot artista capaz de tocar el violín
La música es oído, técnica y tiempo. Quizás el robot diseñado por Toyota no tenga lo primero, pero técnica le sobra. El músico androide mide metro y medio de altura y pesa 56 kilos. Su principal arma su brazo, no la utiliza con fines bélicos sino musicales.
El brazo de este robot es capaz de ejecutar los movimientos de un violinista humano, e incluso es capaz de imitar el gesto para reproducir un vibrato como un verdadero músico. Además de violinista el androide tiene algo de altruista. Toyota ha enfatizado en el desarrollo de un bípedo que pueda realizar movimientos complejos con sus brazos con el objetivo de que pueda colaborar en las tareas domésticas o en el cuidado de enfermos.
La compañía nipona también ha presentado en sociedad la silla de ruedas inteligente, de un metro de alto y 150 kilos. Su principal virtud es moverse en cualquier dirección y sortear escalones y obstáculos. Este robot tiene una autonomía de 20 kilómetros y puede desplazarse a una velocidad media de 6 kilómetros por hora y superar cuestas de hasta un 10 por ciento de desnivel.
De forma similar a lo que sucede en la Fórmula 1, la división de robótica de la compañía japonesa desarrolla este tipo de prototipos para posteriormente generalizar los avances tecnológicos que contienen y aplicarlos a otros productos. La silla de ruedas estaría destinada a facilitar el desplazamiento de personas de movilidad reducida, así como el transporte de cargas.
La división de robótica de Toyota está centrada en diseñar nuevos productos que puedan mejorar la vida de las personas en los campos de las tareas domésticas, el cuidado de enfermos, la fabricación de manufacturas y el transporte de personas en distancias cortas. La compañía espera que los avances tecnológicos presentados con estos dos nuevos robots puedan aplicarse y generalizarse para 2010.
Robots enfermeros japoneses para ayudar a la rehabilitación de un paciente

Desde 2007, la empresa nipona trabaja en el programa Toyota Partner Robot, buscando desarrollar tecnologías para robots que permitan mejorar la calidad de vida e integrarse a nuestras rutinas de modo no invasivo. Durante estos cuatro años del programa han nacido proyectos como lo del robot violinista, los transportadores de personas y los más ambiciosos relacionados con futuros robots astronautas. También hemos conocido al robot que levanta personas del suelo y al que nos da baños de esponja.
En este caso, este nuevo proyecto de robot enfermero tiene como objetivo mejorar el proceso de rehabilitación de pacientes con disminuciones motrices por lesiones temporales o por enfermedades que limitan su respuesta física e impiden que puedan desarrollar su vida de manera normal.
El concepto posee cuantro modelos de roboenfermeros: un control para piernas paralizadas, un contenedor del peso corporal para reducir la presión en los miembros inferiores (tobillos y rodillas), uno estilo Segway para mejorar el equilibrio y un sistema de elevación para enfermeras “de verdad”.
El objetivo de Toyota es comenzar a comercializar este tipo de robots en una fecha cercana a 2013, con el objetivo de mejorar los recursos de intituciones de salud donde se requiere de grandes esfuerzos humanos para atender a los pacientes, como pueden ser los centros de rehabilitación o los asilos de ancianos.
Lamentablemente, la empresa japonesa aún no ha informado sobre el lanzamiento de la “enfermera hot”, la cual imaginamos que podría llegar a ser un récord absoluto en ventas.
¿ Cómo construir un robot casero? muy fácil.

Surfeando en la internet, encontre una página web donde muestran como hacer diferentes robot, cada uno con mayor complejidad.
el robot que veremos hoy, sellama cero (0) y es un simple autómata , con sensores sencillos, puede chocar y cambiar de direccion, ( osea como un ciego).
0 (cero)
Robot tremendamente sencillo, que solo necesita un motor. Se puede hacer fácilmente, a parir de los restos de un juguete. Invierte su sentido de movimiento cuando colisiona con un obstáculo.
Un buen robot para empezar. Si nunca has hecho nada parecido, pero te gustaría construir un robot, de una forma rápida, y sin tener que buscar prácticamente ningún componente.
Este robot está pensado para poderse construir con un coste muy bajo.
Sólo necesitas un motor con reductora que se puede extraer de un juguete viejo, junto con las ruedas. Un poco de madera en forma de chapa de okumen y un cuadradillo de 1 cm.
Para el circuito eléctrico, necesitarás un final de carrera (se puede encontrar fácilmente en una tienda de componentes electrónicos -no cuesta mucho-), un interruptor y un par de pilas. No se necesitan circuitos impresos. Las conexiones se realizan directamente uniendo los componentes con cable.
0 (cero)
Si tienes en cuenta que cuando a un motor eléctrico de corriente continua -como los alimentados con pilas- se le invierten los polos de conexión gira en sentido contrario, comprender el funcionamiento de 0 (cero) es sencillo.
El final de carrera se encarga de alimentar el motor con una pila u otra. Las pilas suministran por lo tanto corriente al motor con una polaridad u otra, por lo que este gira en un sentido o el contrario.En definitiva, para hacer que el motor gire en un sentido o en el otro, lo único que hay que hacer es poner en una posición u otra en final de carrera SW1.0 (cero)Cuando 0 (cero) se pone en funcionamiento gracias al interruptor de puesta en marcha, avanza hasta encontrar un obstáculo (por ejemplo una pared).En el momento en el que colisiona, el parachoques retrocede, lo que hace que se accione la palanquita del final de carrera. El motor invierte su sentido de giro, por lo que el
robot retrocede.Cuando colisione con la parte de atrás con otro obstáculo, el parachoques trasero se desplazará, y la palanquita del final de carrera se liberará y el robot avanzará de nuevo.
Este proceso se repite indefinidamente, hasta que 0 (cero) se para con el interruptor.1. ComponentesLos componentes que se emplean son muy simples y fáciles de conseguir.
- Un motor con su juego de engranajes y las ruedas correspondientes. Hay juguetes muy baratos de importación de los que se puede extraer un motor con reductora. Yo he comprado alguno por menos de un Euro (o un Dólar).
- Unas ruedas con su eje que giren libremente. Yo he incluido dos trocitos de pajita rosa, para que hagan de cojinetes, pero es fácil encontrar otros sistemas.
- Un final de carrera. Son fáciles de conseguir en tiendas de componentes electrónico (busca en alguna guía de teléfonos local).
- Un interruptor para poner a 0 (cero) en marcha o pararlo.
- Para alimentar el circuito eléctrico se utilizarán dos pilas de petaca de 4’5 voltios. Si el motor que vas a utilizar funciona mejor a otro voltaje, deberías seleccionar dos pilas que tengan el voltaje adecuado para tu motor (¿Cómo eran las pilas del juguete de donde has sacado el motor?).
- Además para la estructura necesitarás chapa de madera (okumen) y menos de un metro de cuadradillo de 1 cm. El cuadradillo es un listón de madera con la sección cuadrada, en este caso de un cm de lado.
- Para unir los componentes de la estructura usaremos cola blanca y cola térmica.
Nota Es conveniente soldar las uniones eléctricas, pero podrías pensar en hacerlas enrollando los cables. 1. Montaje1.1. Parachoques y final de carreraEl sistema sensor de colisión es puramente mecánico y está fabricado en madera (una pieza de chapa de okumen de 19 cm x 7,8 cm y una estructura deslizante fabricada con un cuadradillo de madera de pino de 1 cm de lado).Para la fabricación de los parachoques, se cortan en el cuadradillo piezas con las siguientes longitudes.
- Una de 23 cm es el eje longitudinal
- Dos de 12 cm que son los parachoques propiamente dichos
- Dos de 3,1 cm para los arcos que hacen de guía al eje longitudinal
- Cuatro de 1 cm para el soporte de los arcos antes mencionados Una de 2 cm para accionar el final de carrera
La unión de los parachoques al eje longitudinal está realizada a “media madera”, como se ve en la fotografía. Esto da cierta robustez y evita que el parachoques salga volando. Es fácil de hacer con un serrucho y una lima. Cuando se tiene la forma, se unen con cola blanca.
Los dos arcos que fijan al eje longitudinal se hacen de forma que haya una holgura de cerca de 1 mm, esto se consigue al fijar los taquitos laterales del arco con cola blanca, y pegando con cola térmica el arco así formado a la base. La cola térmica eleva el arco lo suficiente como para que el eje longitudinal pueda deslizarse sin problemas.Una vez montado, probado y ajustado el eje longitudinal se fija el tope accionador del final de carrera, y el propio final de carrera, asegurando que se pueda accionar correctamente, para ello es conveniente girarle unos 10 º.
A continuación se puede ver el funcionamiento del sistema parachoques-final de carrera, en sus dos posiciones.En la parte superior, también con cola térmica, se fijan directamente las pilas de petaca y el interruptor.
Posteriormente se realizan las conexiones siguiendo el esquema eléctrico ya mencionado.
Es entretenido montar todo el sistema, pero ponlo en marcha y verás donde empieza la diversión.





¿Qué es la robótica ?

La robótica es la rama de la tecnología diferenciada de la telecomunicación (cuya función es cubrir todas las formas de comunicación a distancia)que se dedica al diseño, construcción, operación, disposición estructural, manufactura y aplicación de los robots.1 2 La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control.3 Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.
El término robot se popularizó con el éxito de la obra RUR (Robots Universales Rossum), escrita por Karel Capek en 1920. En la traducción al inglés de dicha obra, la palabra checa robota, que significa trabajos forzados, fue traducida al inglés como robot.
Historia de la robótica
La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.
Por: Milton Valera
Eco-robots ayudan a reciclar la basura

Si bien es cada vez más la gente que toma conciencia y separa la basura en casa o recicla cada vez que puede, sigue habiendo montones y montones de desperdicios que se desperdician (valga la redundancia) y llegan a los basurales cuando podrían ser reutilizados.
La compañía finlandesa puso un equipo a desarrollar un robot con una funcionalida específica: ayudar a ordenar y seleccionar los deshechos y la basura en general para detectar aquellos materiales reciclables. En principio se trata simplemente de un brazo mecánico conectado a una computadora que las hace de cerebro.
Hasta el momento, las pruebas remiten un 50% de efectividad identificando objetos y deshechos reciclables entre materiales de construcción. Si bien no parece demasiado eficiente, vale la pena tenerlo en cuenta cuando se piensa en las montañas y montañas de basura y desperdicios que se genera en este sector y muchas veces sigue de largo al basural.
El robot aún no tiene nombre, pero ya está equipado con varias opciones y alternativas para la tarea: detector de metales, de peso, scanner 3D.
Suscribirse a:
Entradas (Atom)